Підпишіться на наші соціальні мережі для оперативної публікації
В епоху новаторських технологічних кроків навігаційні системи стали фундаментальними стовпами, що рухали численні досягнення, особливо в секторах, критично важливих для точності. Шлях від рудиментарної небесної навігації до складних інерціальних навігаційних систем (ІНС) уособлює непохитні прагнення людства до досліджень та високої точності. Цей аналіз глибоко заглиблюється у складну механіку ІНС, досліджуючи передові технології волоконно-оптичних гіроскопів (ВОГ) та ключову роль поляризації в підтримці волоконних петель.
Частина 1: Розшифрування інерціальних навігаційних систем (ІНС):
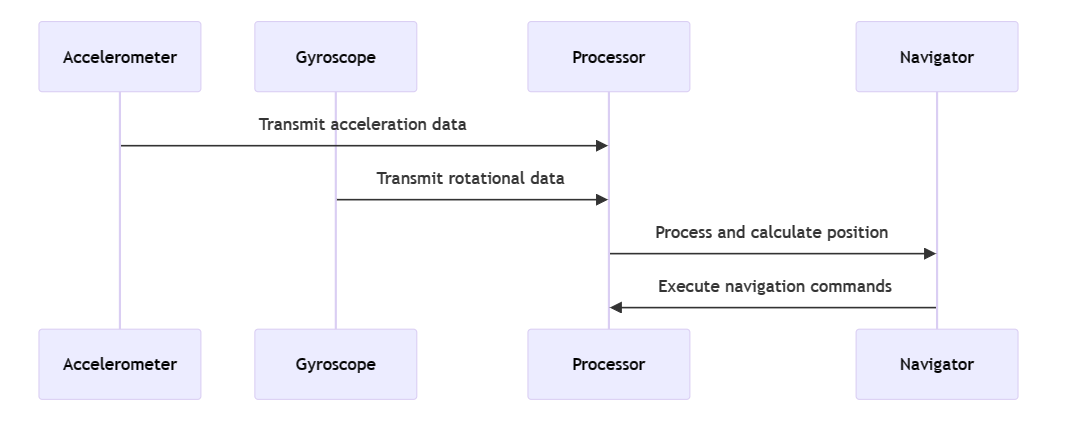
Інерціальні навігаційні системи (ІНС) виділяються як автономні навігаційні засоби, що точно обчислюють положення, орієнтацію та швидкість транспортного засобу незалежно від зовнішніх сигналів. Ці системи гармонізують датчики руху та обертання, бездоганно інтегруючись з обчислювальними моделями для початкової швидкості, положення та орієнтації.
Архетипна INS охоплює три кардинальні компоненти:
· Акселерометри: ці важливі елементи реєструють лінійне прискорення транспортного засобу, перетворюючи рух на вимірювані дані.
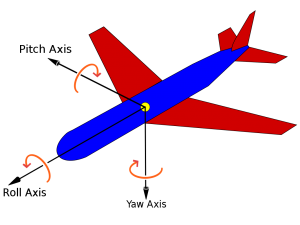
· Гіроскопи: ці компоненти є невід'ємною частиною визначення кутової швидкості та є ключовими для орієнтації системи.
· Комп'ютерний модуль: нервовий центр INS, що обробляє багатогранні дані для отримання аналітики позиції в режимі реального часу.
Нестійкість INS до зовнішніх перешкод робить її незамінною в оборонному секторі. Однак вона стикається з «дрейфом» – поступовим зниженням точності, що вимагає складних рішень, таких як об'єднання датчиків для зменшення помилок (Chatfield, 1997).
Частина 2. Динаміка роботи волоконно-оптичного гіроскопа:
Волоконно-оптичні гіроскопи (ВОГ) сповіщають про початок трансформаційної ери в обертальному зондуванні, використовуючи інтерференцію світла. Завдяки точності, ВОГ життєво важливі для стабілізації та навігації аерокосмічних апаратів.
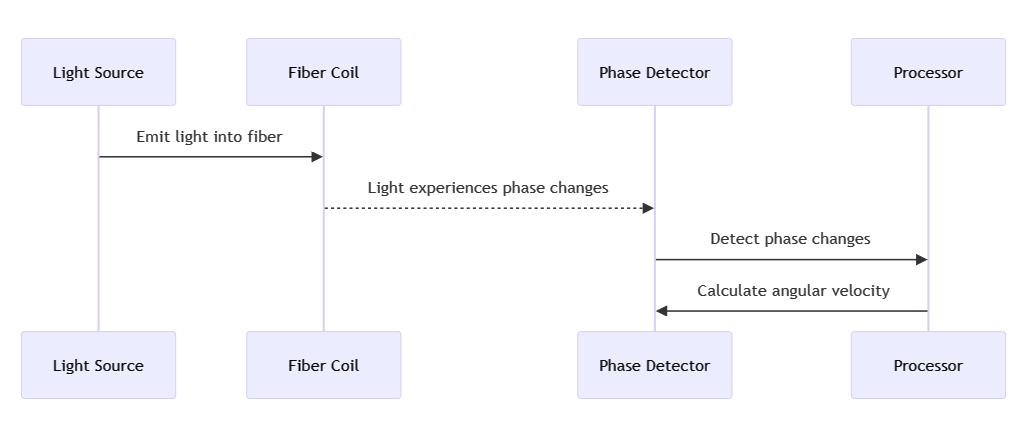
ФОГ працюють на ефекті Саньяка, де світло, рухаючись у протилежних напрямках всередині обертової волоконної котушки, демонструє фазовий зсув, що корелює зі змінами швидкості обертання. Цей тонкий механізм перетворюється на точні показники кутової швидкості.
Основні компоненти включають:
· Джерело світла: Початкова точка, зазвичай лазер, що ініціює когерентну світлову подорож.
· Волокниста котушкаСпіральний оптичний канал подовжує траєкторію світла, тим самим посилюючи ефект Саньяка.
· Фотодетектор: Цей компонент розрізняє складні інтерференційні картини світла.
Частина 3: Значення поляризації для підтримки волоконних петель:
Оптоволоконні петлі з підтримкою поляризації (PM), що є квінтесенцією для оптичних галактик (ВОГ), забезпечують рівномірний стан поляризації світла, що є ключовим фактором точності інтерференційної картини. Ці спеціалізовані волокна, борючись з дисперсією поляризаційних мод, підвищують чутливість ВОГ та достовірність даних (Kersey, 1996).
Вибір волокон PM, продиктований експлуатаційними вимогами, фізичними характеристиками та системною гармонією, впливає на загальні показники продуктивності.
Частина 4: Застосування та емпіричні докази:
Функціональні зони для спостереження за об'єктами (FOG) та інтраорбітальні інтелектуальні космічні апарати (INS) знаходять своє застосування в різних сферах, від організації безпілотних літальних апаратів до забезпечення кінематографічної стабільності в умовах непередбачуваності навколишнього середовища. Свідченням їхньої надійності є їхнє використання в марсоходах NASA, що сприяє безвідмовній позаземній навігації (Maimone, Cheng, and Matthies, 2007).
Ринкові траєкторії прогнозують бурхливе зростання ніші для цих технологій, а вектори досліджень спрямовані на зміцнення стійкості системи, матриць точності та спектрів адаптивності (MarketsandMarkets, 2020).

Кільцевий лазерний гіроскоп
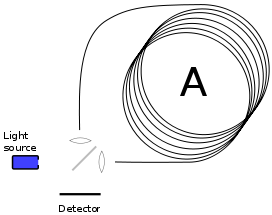
Схема волоконно-оптичного гіроскопа на основі ефекту Саньяка
Список літератури:
- Чатфілд, Альберта, 1997.Основи високоточної інерціальної навігації.Прогрес в астронавтиці та аеронавтиці, т. 174. Рестон, Вірджинія: Американський інститут аеронавтики та астронавтики.
- Керсі, А.Д. та ін., 1996. «Волоконно-оптичні гіроскопи: 20 років технологічного прогресу», уМатеріали IEEE,84(12), с. 1830-1834.
- Маймоне, М. В., Ченг, Ю. та Маттіс, Л., 2007. «Візуальна одометрія на марсоходах – інструмент для забезпечення точного керування та наукової візуалізації»,Журнал IEEE «Робототехніка та автоматизація»,14(2), с. 54–62.
- MarketsandMarkets, 2020. «Ринок інерціальних навігаційних систем за класом, технологією, застосуванням, компонентом та регіоном – глобальний прогноз до 2025 року».
Застереження:
- Цим ми заявляємо, що деякі зображення, що відображаються на нашому веб-сайті, зібрані з Інтернету та Вікіпедії з метою подальшого навчання та обміну інформацією. Ми поважаємо права інтелектуальної власності всіх оригінальних авторів. Ці зображення використовуються без мети отримання комерційної вигоди.
- Якщо ви вважаєте, що будь-який використаний контент порушує ваші авторські права, будь ласка, зв’яжіться з нами. Ми більш ніж готові вжити відповідних заходів, включаючи видалення зображень або належне зазначення авторства, щоб забезпечити дотримання законів та правил інтелектуальної власності. Наша мета — підтримувати платформу, яка є багатою на контент, справедливою та поважає права інтелектуальної власності інших.
- Будь ласка, зв'яжіться з нами за допомогою наступного способу зв'язку,email: sales@lumispot.cnМи зобов’язуємося вживати негайних заходів після отримання будь-якого повідомлення та гарантувати 100% співпрацю у вирішенні будь-яких таких проблем.
Час публікації: 18 жовтня 2023 р.